
I am currently a master student at the State Key Laboratory of Robotics and Systems at Harbin Institute of Technology , mainly engaged in the research of exoskeleton robots and soft robots.
I earned my bachelor’s degree at School of Mechanical and Aerospace Engineering at Jilin University , under the guidance of Prof. Zhihui Zhang. Now, I am pursuing a master’s degree in the research group of Prof. Jie Zhao, Director of the Robotics Institute of Harbin Institute of Technology, under the guidance of Prof. Yanhe Zhu.
My research interest includes preference-based optimizations of exoskeleton assistance during walking 🚶 and anti-interference soft manipulator with precise motion controller 🐙 . I have published 4 papers in top international journals and 2 papers in top international robotics conferences with total google scholar citations 50+ .
🔥 News
- 2025.05.17: 🎉🎉🎉I was accepted into the Doctor of Philosophy in Biomedical Engineering Programme at the College of Design and Engineering at the National University of Singapore🦁🏫 and received funding from the NUS RESEARCH SCHOLARSHIP.
- 2024.10.25: 🎉🎉🎉My team and I won the special prize in the China Graduate Robot Innovation Design Competition and third place in the country.
- 2024.06.30: 🎉🎉🎉My paper has been accepted for publication in the Proceedings of the 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2024) as oral pitch and interactive presentation.
📖 Educations
- 2022.06 - now, Robotics Engineering, the State Key Laboratory of Robotics and Systems, Harbin Institute of Technology, Harbin.
- 2018.09 - 2022.06, Mechanical Engineering, School of Mechanical and Aerospace Engineering, Jilin University, Changchun.
💻 Internships
- 2024.07 - 2024.08, R&D Intern, Institute of Automation, Chinese Academy of Sciences, Beijing, China.
- 2024.09 - 2024.12, System Engineer Assistant Intern, UAV Business Department, Meituan, Beijing, China.
📝 Publications
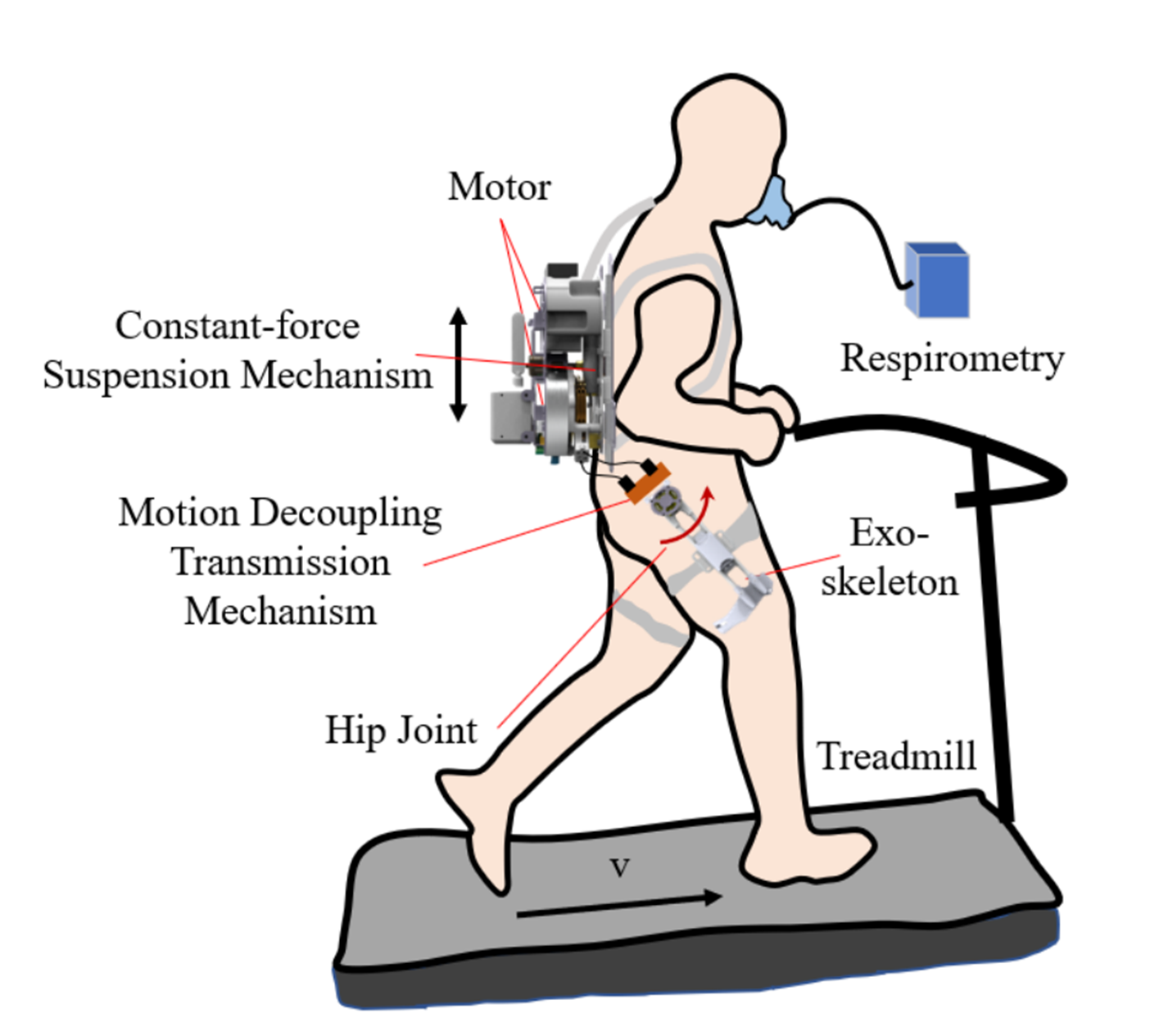
Using Hip Assisted Running Exoskeleton with Impact Isolation Mechanism to Improve Energy Efficiency
Ziqi Wang, Junchen Liu, Hongwu Li, Qinghua Zhang, Xianglong Li, Yi Huang, Haotian Ju, Tianjiao Zheng, Jie Zhao, Yanhe Zhu
- An innovative and efficient hip-assisted running exoskeleton designed to facilitate the flexion and extension movements of the joint along the sagittal plane.
- An active-passive combination constant force suspension system to effectively mitigate the impact of inertial forces during running.
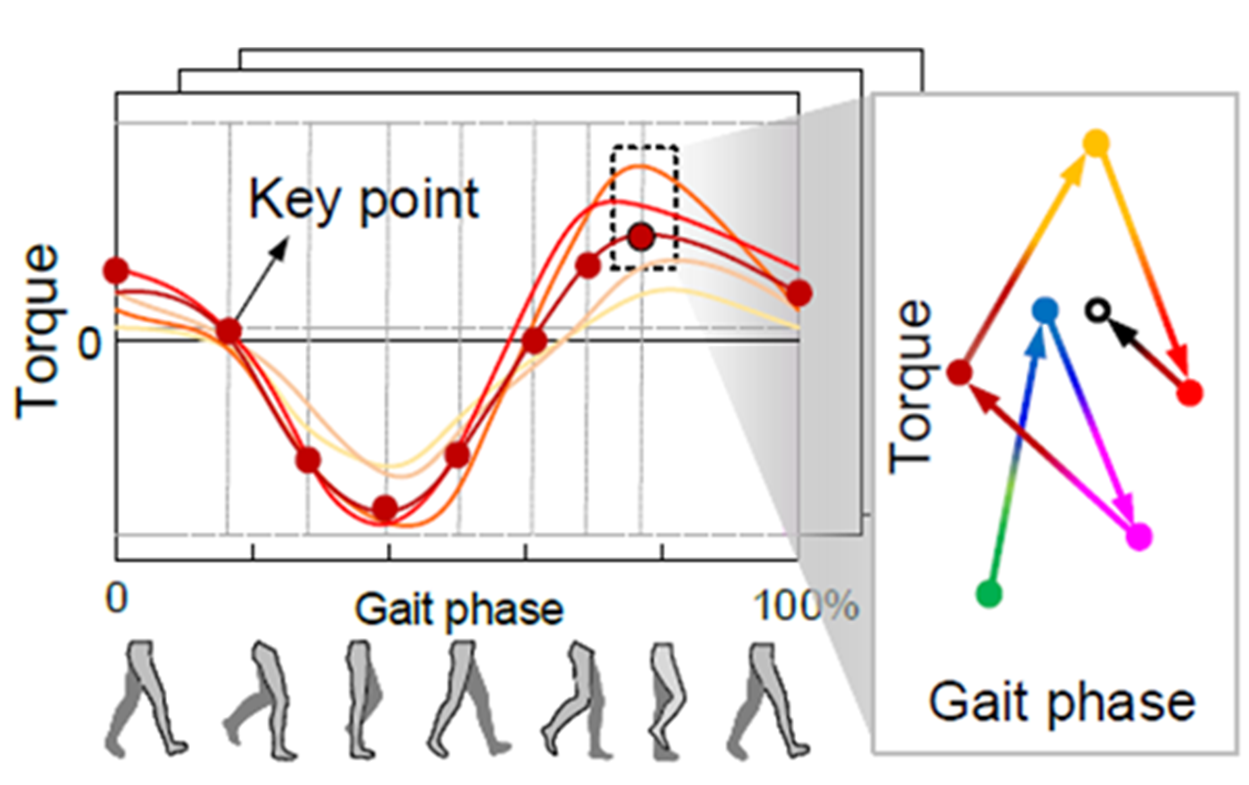
- The joint torque-generating strategy provides personalized assistance strategies for wearers to actively optimize the control parameters.
- The exoskeleton can reduce the energy consumption of the human body by 5.33 % at a speed of 9 km/h.
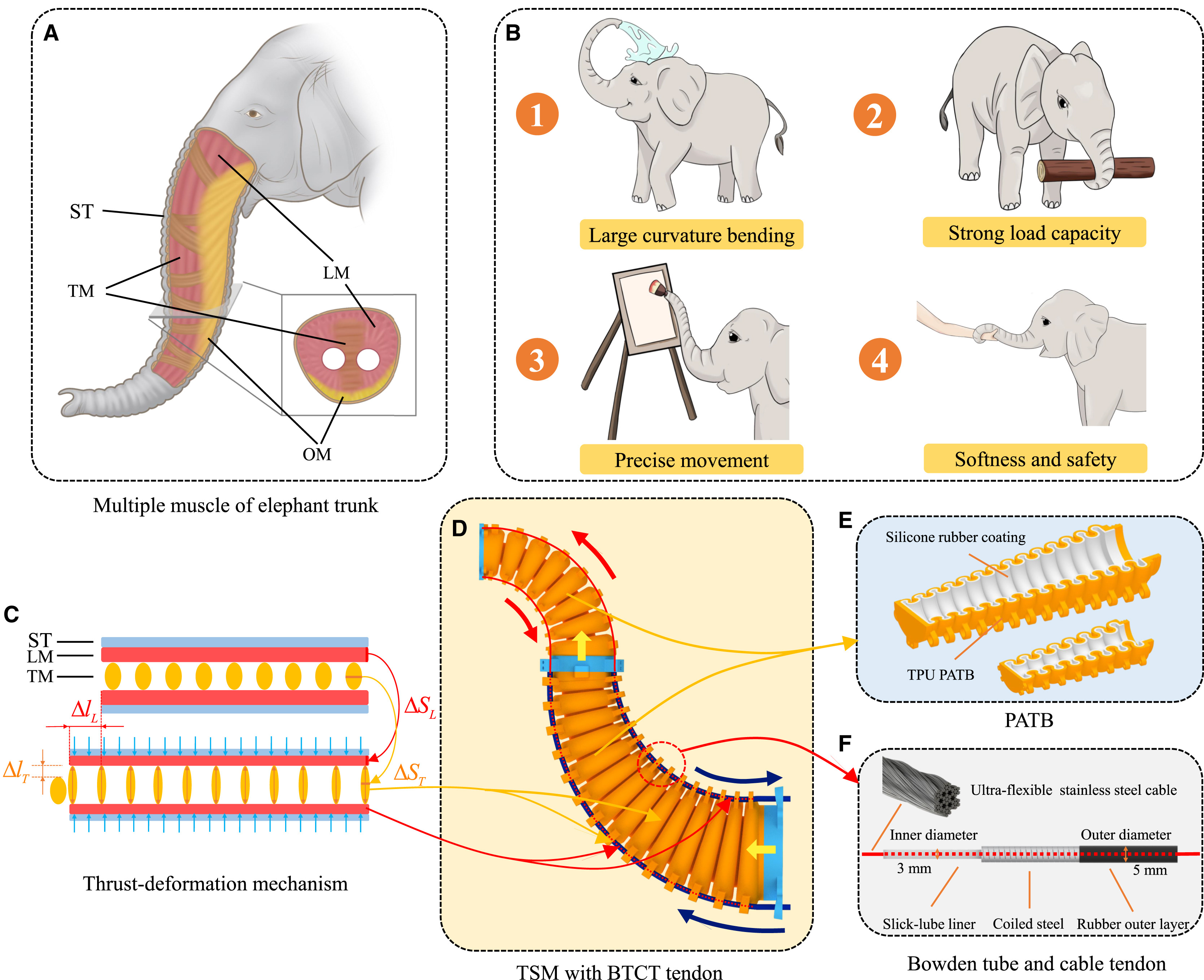
Biomimetic tapered soft manipulator with precision and load-bearing capacity
Xianglong Li, Shouyi Zhang, Quan Xiong, Dongbao Sui, Qinghua Zhang, Ziqi Wang, Lingkai Luan, Tianjiao Zheng, Jizhuang Fan, Jie Zhao, Yanhe Zhu
- A biomimetic tapered soft manipulator inspired by an elephant’s trunk.
- An equivalent finite element model for Bowden tube tendon analysis.
- Large deformation and flexible movement of the entire robotic arm.
- Verified stability, load-bearing, and safe human interaction through softening.
Xianglong Li, Quan Xiong, Dongbao Sui, Qinghua Zhang, Hongwu Li, Ziqi Wang, Tianjiao Zheng, Hesheng Wang, Jie Zhao, Yanhe Zhu
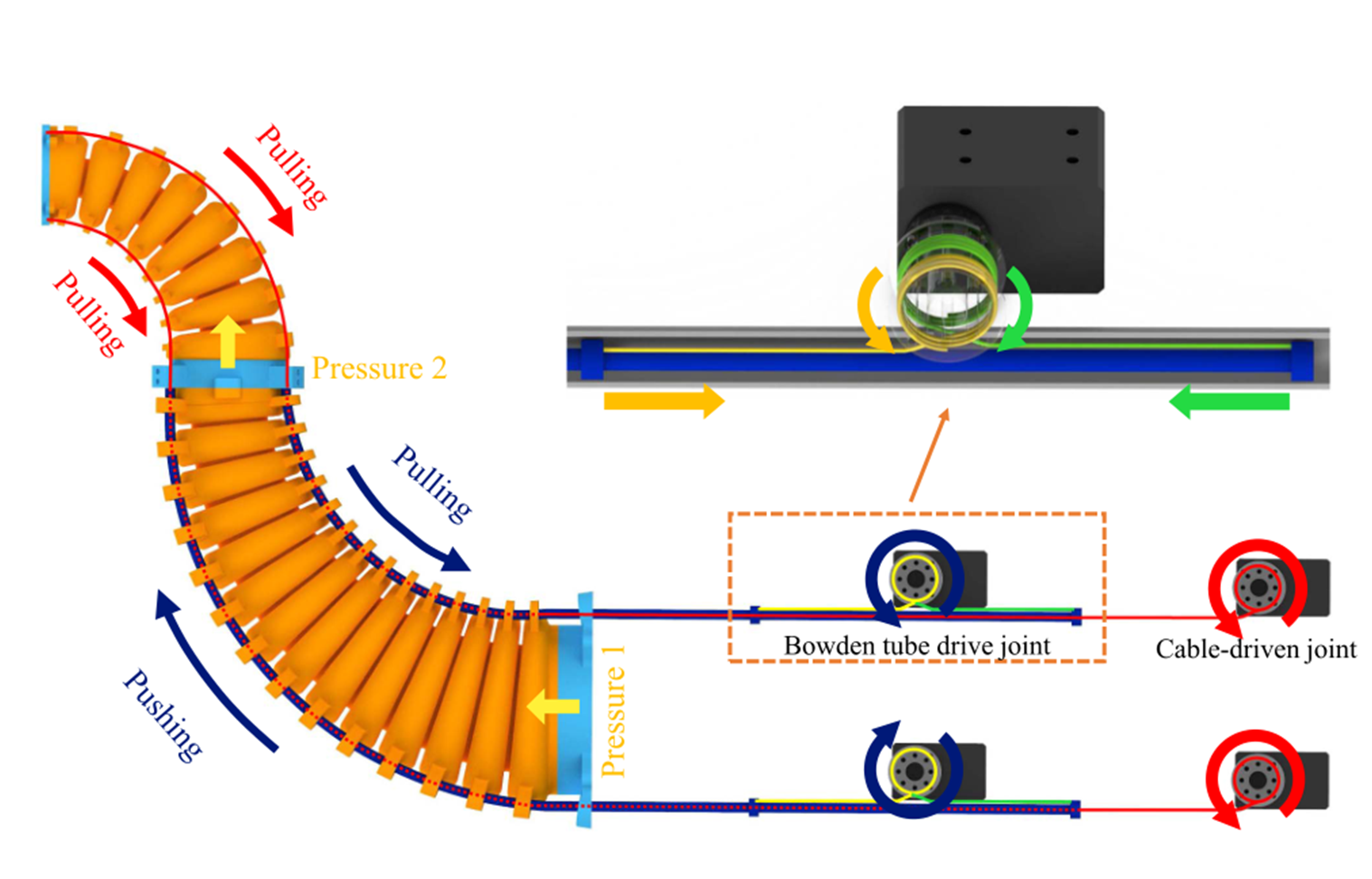
- A novel cable–pneumatic hybrid-driven tapered soft manipulator (TSM) design and control scheme to enhance the performance in actual tasks.
- Experimental results [spatial point positioning error (mean error of stable region: 0.17 mm), circular trajectory tracking error (mean and standard deviation (SD) of 100 trials: 0.87 ± 0.57 mm), orientation control error (less than 1 ∘ )].
Hongwu Li, Junchen Liu, Ziqi Wang, Haotian Ju, Tianjiao Zheng, Yongsheng Gao, Jie Zhao, Yanhe Zhu
- A novel preference-based human-exoskeleton locomotion interaction experience transfer (LIET) framework, which could speed up the exploration of human-preferred parameters and acquire more satisfying results for naive wearers via the HELIE acquired from knowledgeable wearers.
- Established the mathematical expression of the HELIE transfer during exoskeleton assistance based on the proposed LIET framework.
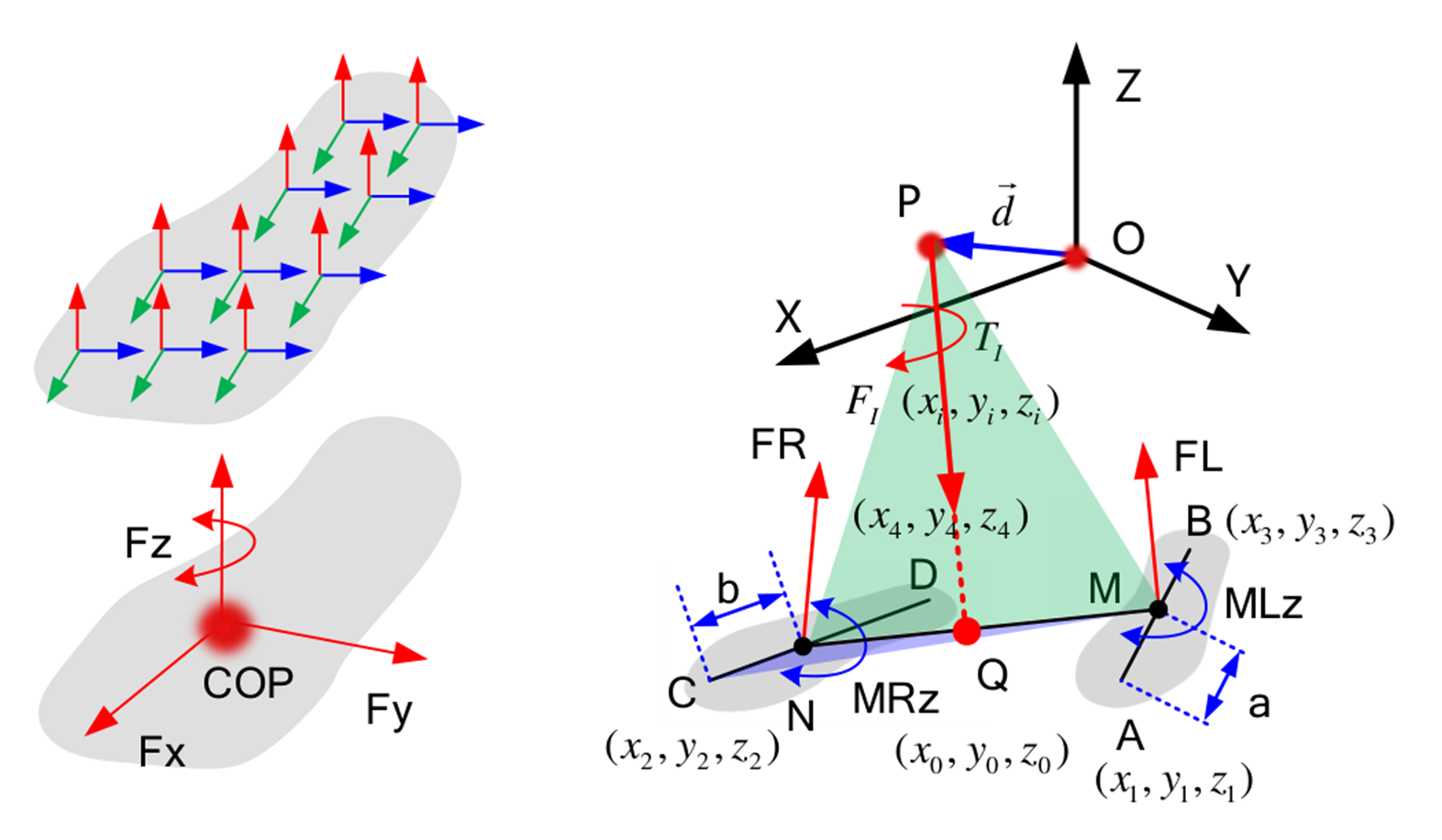
Hongwu Li, Haotian Ju, Junchen Liu, Ziqi Wang, Qinghua Zhang, Xianglong Li, Yi Huang, Tianjiao Zheng, Jie Zhao, Yanhe Zhu
- A novel method for estimating CFMs based on a proposed dynamic decoupled coordinate system (DDCS) and the minimum energy hypothesis.
- By decomposing CFMs into a DDCS, the number of unknowns can be significantly reduced from twelve to two.
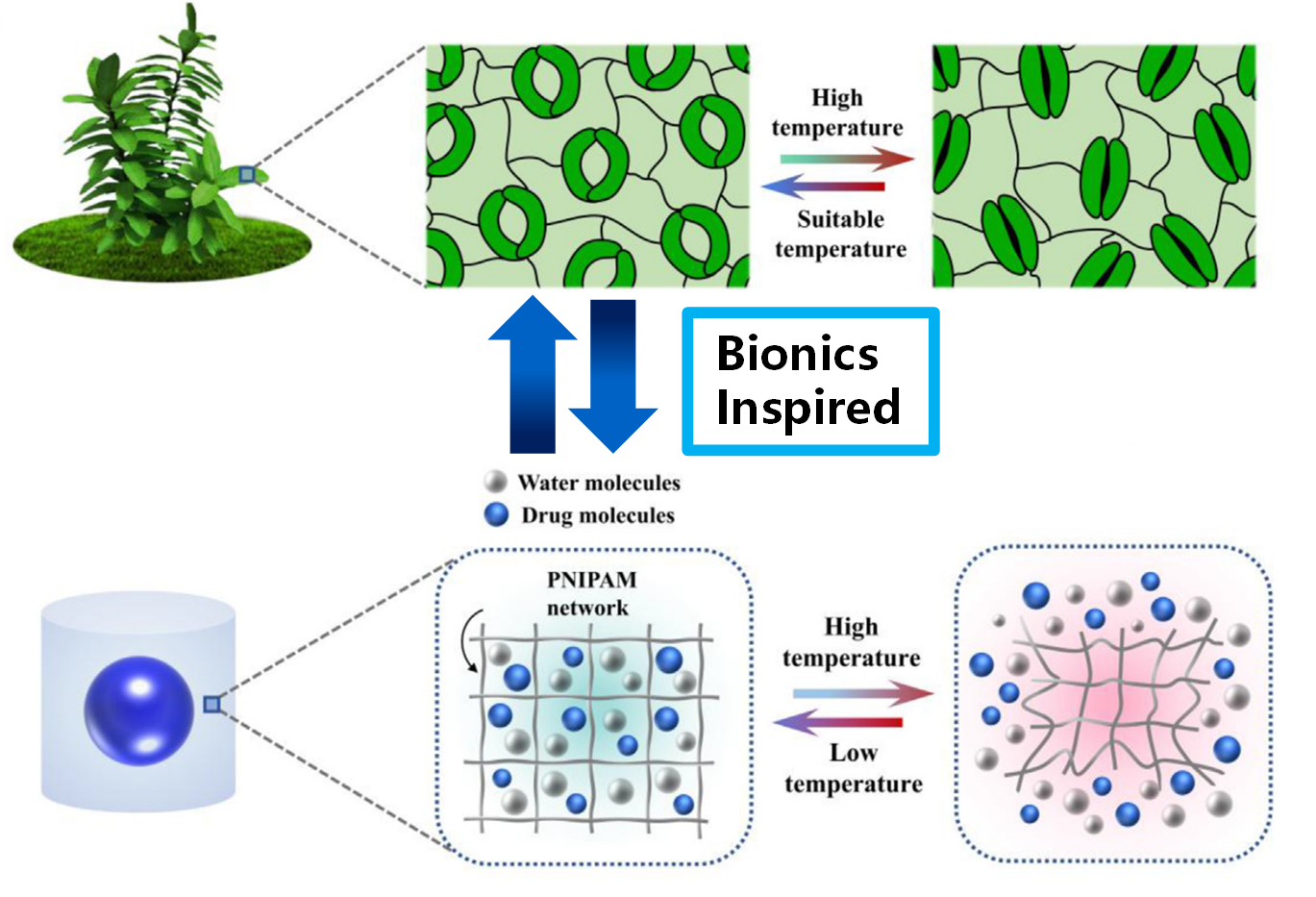
A bioinspired 4D printed hydrogel capsule for smart controlled drug release
S. Zu, Z. Wang, S. Zhang, Y. Guo, C. Chen, Q. Zhang, Z. Wang, T. Liu, Q. Liu, Z. Zhang
- Through a 4D printing method to produce bioinspired hydrogel capsules for smart controlled drug release.
- The 4D printed capsules featured with PNIPAM hydrogel as the shell, and the types and doses of drugs can be freely loaded.
- Drug release profiles can be well programmed by adjusting the internal pore size of the hydrogel capsules.
- In contrast to common 4D external shape change, we used 4D printing to produce change in internal material structure.
🎖 Honors and Awards
- 2022.12 First Prize in the National Undergraduate Electronic Design Competition.
- 2023.12 First Prize of Harbin Institute of Technology Space Station Space Science and Payload Creative Innovation Design Competition.
- 2024.10 Special prize in the China Graduate Robot Innovation Design Competition.